
Many people rarely think about what happens behind the screen when a device reacts instantly to an action. A real-time operating system often works quietly in the background, making sure critical tasks happen at the right moment. Whether it is a smartwatch displaying a health alert, a vehicle activating a safety feature, or a medical monitor tracking a patient’s condition, timing can be just as important as the result itself.
Consider a smartwatch that detects an irregular heartbeat. The value of that notification depends on how quickly it appears. A delay of several seconds may not matter when checking the weather, but it becomes far more serious when the information relates to health or safety. Similar situations occur in industrial robots that must react to sensor data without hesitation and vehicle systems that need immediate action to help prevent accidents.
This requirement for predictable timing is where a real-time operating system becomes essential. Unlike ordinary software platforms that focus on overall efficiency, an RTOS is designed to deliver consistent responses within defined time limits.
In many modern embedded systems, success is measured not only by completing a task but also by completing it at exactly the right time. When milliseconds matter, a fast processor alone is not enough. The quality of the response time often determines whether a system operates safely and reliably.
What Is a Real-Time Operating System?
Many computing environments handle thousands of operations every second, yet speed alone does not always solve timing-related challenges. Some applications require tasks to occur within specific time limits, regardless of how busy the system becomes. In these situations, predictable behavior matters more than achieving the highest possible throughput.
Real-Time Operating System Definition
A real-time operating system is a specialized operating system types designed to process data and execute tasks within predefined timing constraints. Instead of focusing primarily on maximizing system utilization, it aims to deliver predictable execution behavior whenever a task is triggered.
The defining characteristic of a real-time operating system is its ability to support deterministic behavior. In a deterministic system, developers can estimate how long a task will take and expect the platform to behave consistently under normal operating conditions. This predictability is especially valuable in environments where timing errors can affect functionality, safety, or reliability.
Unlike traditional operating systems that may reorder workloads to improve overall performance, a real-time operating system uses scheduling methods that prioritize deadline-driven execution. The goal is not simply to finish work quickly but to ensure tasks are completed within the required time window.
Why Timing Predictability Matters
Missing a deadline in a standard desktop application might cause little more than a brief delay. In time-sensitive environments, however, the consequences can be far more significant. A delayed sensor reading, control signal, or safety response may affect the behavior of an entire system.
Many industries rely on real-time computing because certain operations must occur within precise intervals. Medical equipment, industrial controllers, and transportation systems often depend on predictable task execution to maintain safe and reliable operation.
A real-time operating system supports this requirement by providing a consistent and measurable response time. Rather than reacting unpredictably under varying workloads, the platform is designed to maintain deadline compliance. This deterministic response model allows engineers to build systems that can be tested, validated, and trusted in critical environments.
Why a Real-Time Operating System Is Needed
Many computing environments process information continuously, but not every system can tolerate delays. As devices become more connected and automated, the need for predictable execution grows across industries ranging from manufacturing to healthcare.
Problems With Unpredictable Task Execution
In conventional operating systems, multiple applications often compete for processor resources at the same time. This competition can create scheduling delays, especially when workloads increase unexpectedly.
Resource contention introduces uncertainty into execution behavior. A task that finishes immediately during testing may take much longer when additional processes are running. While this variation may be acceptable in general-purpose computing, it can become problematic in systems that depend on strict timing requirements.
Another challenge involves unpredictable execution timing. If a system cannot guarantee when a task will start or finish, developers may struggle to maintain reliable performance. Increased latency can lead to missed deadlines and inconsistent behavior.
How RTOS Solves These Challenges
An RTOS addresses these issues by emphasizing predictable execution rather than maximizing overall throughput. Tasks are managed according to predefined rules that help maintain consistent timing behavior.
One of the most important mechanisms is priority scheduling. Critical tasks receive higher importance, allowing them to run before less urgent operations. This approach reduces the likelihood that essential functions will be delayed by background activities.
A real-time operating system also supports efficient task scheduling, enabling immediate handling of time-sensitive events. By controlling how resources are allocated and when tasks are executed, the platform helps maintain predictable operation even when workloads become more demanding.
How a Real-Time Operating System Works
The behavior of an RTOS is largely determined by how it manages tasks, priorities, and deadlines during operation. Every action follows a structured process that helps maintain timing predictability and reliable execution.
Task Creation and Scheduling
The process begins when applications or devices generate tasks that require processing. These tasks may originate from sensors, user inputs, communication interfaces, or internal system events.
Once created, tasks enter queues managed by a scheduler. The scheduler evaluates available work and determines which task should run based on predefined policies. Tasks waiting for execution remain in a ready state until processor resources become available.
A real-time operating system continuously monitors task status and timing requirements. Rather than selecting work randomly, it follows scheduling rules designed to maintain predictable behavior and efficient resource utilization.
Priority-Based Task Execution
Not all tasks have the same importance. Some operations require immediate attention, while others can safely wait for available processing time.
To handle this difference, a real-time operating system assigns a task priority to each workload. Higher-priority tasks receive processor access before lower-priority activities. This arrangement helps ensure critical operations are executed when needed.
Deadline awareness is also important. The system evaluates timing requirements and makes scheduling decisions that help prevent critical tasks from missing their required completion windows.
Interrupt Handling and Context Switching
External events often require immediate processing. Sensors may detect changes, communication devices may receive data, or safety systems may trigger alerts.
When these events occur, interrupt handling mechanisms notify the operating system that attention is required. The processor temporarily pauses its current activity so the urgent event can be addressed.
This transition is managed through context switching, a process that saves the current task state before transferring control to another task. Once the urgent work is complete, execution resumes without losing progress.
Meeting Timing Constraints
The ultimate goal of a real-time operating system is to ensure tasks finish within their required deadlines. Achieving this objective requires predictable scheduling, efficient resource management, and controlled execution behavior.
By carefully managing execution time, priorities, and system events, the platform produces consistent outcomes across different workloads. This deterministic approach allows developers to build systems that can reliably meet strict timing constraints while maintaining stable operation.
Types of Real-Time Operating System
Timing requirements vary across devices, industries, and workloads. A heart pacemaker operates under far stricter conditions than a media player, while a factory robot faces different demands than a video streaming platform.
Because timing expectations differ from one application to another, RTOS platforms are commonly grouped into several categories based on how they handle deadlines and timing guarantees.
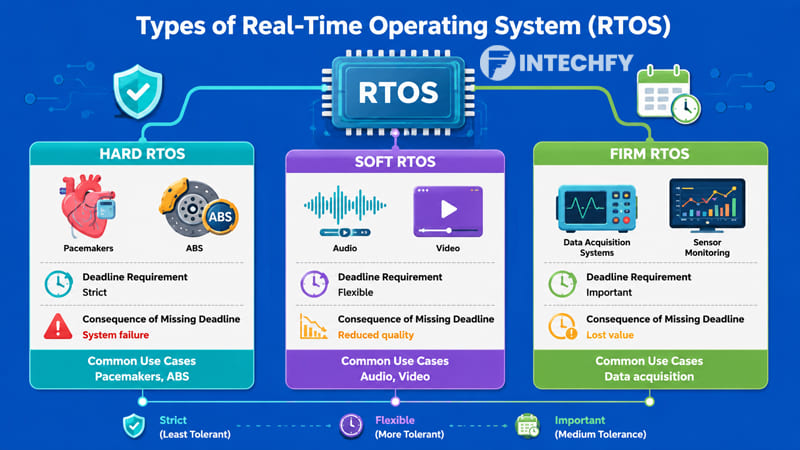
Hard Real-Time System
A hard real-time system operates under strict timing requirements where every deadline must be met. Missing even a single deadline can trigger serious consequences, including equipment failure, financial loss, or safety risks.
For that reason, engineers use this category in environments where predictable operation is a core requirement rather than a performance goal.
Examples include pacemakers, anti-lock braking systems (ABS), aircraft control computers, and industrial safety controllers. In these environments, a delayed response can affect the entire operation. A real-time operating system designed for hard real-time workloads focuses heavily on deterministic execution and deadline compliance to maintain stable performance under pressure.
Soft Real-Time System
A soft real-time system still values timing, but occasional deadline misses do not result in catastrophic outcomes. The system continues operating, though users may notice reduced quality or temporary performance degradation.
Digital audio processing, video conferencing, streaming services, and interactive media often fall into this category. A slight delay may create buffering, dropped frames, or lower audio quality, yet the application remains functional.
A real-time operating system supporting soft real-time workloads balances responsiveness with resource efficiency, making it suitable for applications where user experience matters but strict deadline guarantees are not always required.
Firm Real-Time System
A firm real-time system sits between hard and soft real-time models. Deadlines remain important, and results produced after the required time window usually lose their value. Even so, an occasional miss does not necessarily threaten the stability of the entire system.
Data acquisition systems, sensor monitoring platforms, and industrial inspection equipment often use this approach. Information delivered too late may become irrelevant, forcing the system to discard the result and continue processing newer data.
A real-time operating system used in these environments aims to maximize deadline success rates while maintaining efficient operation across changing workloads.
| Type | Deadline Requirement | Consequence of Missing Deadline | Common Use Cases |
|---|---|---|---|
| Hard RTOS | Strict | System failure | Pacemakers, ABS |
| Soft RTOS | Flexible | Reduced quality | Audio, Video |
| Firm RTOS | Important | Lost value | Data acquisition |
Features of a Real-Time Operating System
Several technical characteristics distinguish an RTOS from a conventional operating environment. These features allow the platform to deliver consistent timing behavior, maintain reliability, and support workloads that depend on predictable execution.
Deterministic Behavior
Deterministic behavior refers to the ability to produce predictable results under known conditions. Engineers can estimate how long a task requires and expect similar timing during repeated execution.
A real-time operating system relies heavily on this principle because timing consistency often matters as much as the outcome itself. This predictable behavior creates a dependable foundation for critical applications.
Priority-Based Scheduling
Priority management allows urgent tasks to receive processor access before lower-priority activities. This mechanism helps the system focus resources on operations that require immediate attention.
Through carefully designed scheduling policies, a real-time operating system can reduce waiting time for critical workloads and improve overall responsiveness. Priority handling also supports stable operation during periods of heavy activity.
Low Latency Response
Fast reaction times are essential in environments where events require immediate processing. Low latency reduces delays between an incoming event and the corresponding action.
Whether a sensor detects a condition change or a control signal arrives from external hardware, a real-time operating system is designed to minimize waiting periods. This capability contributes to accurate and reliable system behavior.
Multitasking Capability
Modern devices often perform several activities simultaneously. An RTOS supports multitasking, allowing multiple tasks to share processor resources efficiently without sacrificing timing requirements.
Proper coordination ensures concurrent workloads continue operating smoothly while maintaining a predictable deterministic response.
This capability is particularly valuable in embedded devices that handle communication, monitoring, and control functions at the same time.
Core Components of an RTOS
Reliable timing behavior depends on more than scheduling policies alone. Every RTOS includes a collection of components that coordinate task execution, resource allocation, synchronization, and communication across the system. Together, these elements form the foundation that supports predictable operation.
Kernel
The kernel serves as the core of the operating environment. It manages processor access, memory resources, and task execution while maintaining system stability. Most RTOS platforms rely on a compact kernel architecture to reduce overhead and improve timing consistency. Efficient kernel design contributes directly to predictable system behavior.
Scheduler
The scheduler determines which task runs at any given moment. It evaluates priorities, task states, and timing requirements before assigning processor time. A real-time operating system depends heavily on this component because scheduling decisions directly influence deadline compliance and system responsiveness. Effective scheduling helps maintain orderly execution across competing workloads.
Semaphore and Mutex
A semaphore and mutex help coordinate access to shared resources. Without proper synchronization, multiple tasks could attempt to modify the same data simultaneously, creating unpredictable results. These mechanisms regulate resource usage and help preserve data integrity. They also reduce conflicts that might interfere with timing-sensitive operations.
Message Queues and IPC
Tasks frequently need to exchange information while running independently. A message queue provides a structured way to transfer data between tasks, while IPC (Inter-Process Communication) mechanisms support broader communication needs. These tools improve coordination across the system and allow components to work together efficiently without disrupting execution timing.
Examples of Real-Time Operating Systems
Several RTOS platforms have been developed for embedded devices, commercial products, industrial equipment, and mission-critical environments. Each platform targets different requirements, ranging from small microcontrollers with limited memory to highly specialized systems used in transportation, healthcare, and aerospace.
FreeRTOS
FreeRTOS is one of the most widely deployed RTOS platforms in the world. Originally developed by Real Time Engineers Ltd. and later acquired by Amazon Web Services, it is known for its lightweight architecture and broad microcontroller support.
A real-time operating system based on FreeRTOS is commonly found in smart sensors, consumer electronics, industrial controllers, and connected IoT devices. Its small footprint makes it attractive for projects with limited memory and processing resources.
Zephyr RTOS
Zephyr RTOS is an open-source project hosted by the Linux Foundation. It supports a large range of hardware architectures and provides a modular design that allows developers to include only the components required for a specific application.
A real-time operating system built on Zephyr is frequently used in wearables, smart home products, connected sensors, and modern embedded development projects. Security features and active community support have contributed to its growing adoption.
QNX
QNX is a commercial RTOS developed by BlackBerry. It is built around a microkernel architecture that focuses on reliability, fault isolation, and stability.
A real-time operating system powered by QNX is often deployed in automotive infotainment systems, industrial control equipment, railway systems, and medical technology. Its reputation for reliability has made it a preferred option for safety-focused environments.
RTEMS and ThreadX
RTEMS was designed for embedded applications that require high reliability. It has gained strong adoption within aerospace programs, defense projects, and scientific research systems where predictable behavior is a critical requirement.
ThreadX, now part of the Eclipse Foundation ecosystem, is another established RTOS platform. It is commonly used in consumer electronics, networking hardware, and industrial products. A real-time operating system based on ThreadX is recognized for efficient performance, low overhead, and support for resource-constrained hardware.
Applications of Real-Time Operating Systems
Predictable execution is essential in environments where timing directly affects safety, accuracy, or operational continuity. A delayed response can produce anything from a minor inconvenience to a critical failure. For that reason, a real-time operating system has become a core technology across numerous industries that depend on precise task execution.
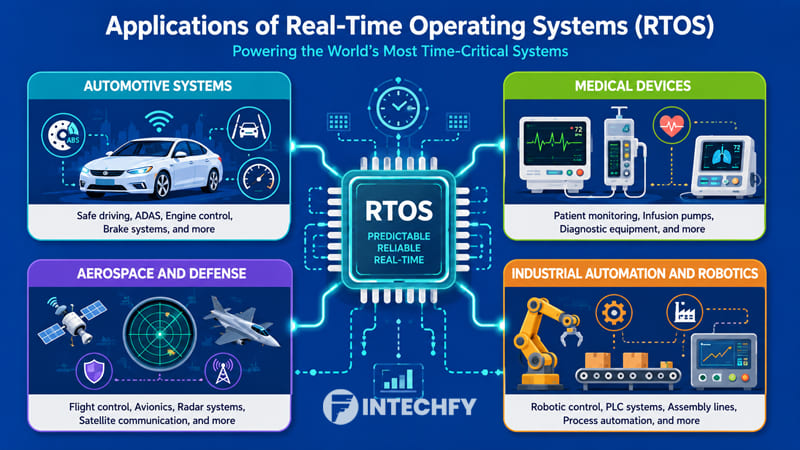
Automotive Systems
Modern vehicles contain dozens of electronic control units responsible for braking, steering, engine management, and driver assistance functions. These automotive systems process information continuously while reacting to changing road conditions.
A real-time operating system allows safety-related functions to execute within strict timing limits. Features such as anti-lock braking systems, adaptive cruise control, and collision avoidance rely on predictable processing to maintain reliable performance.
Medical Devices
Healthcare equipment often depends on immediate responses to sensor data and patient conditions. Delays can affect monitoring accuracy or treatment delivery.
A real-time operating system is frequently used in medical devices such as infusion pumps, cardiac monitors, ventilators, and diagnostic equipment. Consistent timing helps maintain accurate measurements and dependable operation during critical procedures.
Aerospace and Defense
Mission-critical applications require a high level of reliability under demanding conditions. Aircraft control systems, satellite communications, radar platforms, and defense technologies process large amounts of information while operating under strict timing requirements.
A real-time operating system helps maintain predictable execution across these aerospace systems. Engineers depend on deterministic behavior to support navigation, communication, and control functions where delayed processing is unacceptable.
Industrial Automation and Robotics
Factories increasingly rely on intelligent machines to improve efficiency and production quality. Sensors, controllers, and robotic equipment continuously exchange information while coordinating physical actions.
A real-time operating system helps maintain synchronization between equipment and control systems within industrial automation environments. Production lines, automated inspection systems, warehouse technologies, and advanced robotics platforms all benefit from predictable execution.
According to Grand View Research, real-time operating systems represented more than 40% of the global embedded software market revenue in 2024. The report attributes this dominance to the growing demand for predictable and reliable computing in industries such as aerospace, automotive control systems, and industrial automation, where delayed responses can lead to operational failures.
This widespread adoption reflects the growing importance of dependable timing across modern embedded systems, especially as automation continues expanding into new sectors.
Advantages and Disadvantages of a Real-Time Operating System
Organizations choose RTOS platforms because timing consistency often has a direct impact on performance and reliability. At the same time, adopting a real-time operating system introduces technical and operational considerations that developers must evaluate before deployment.
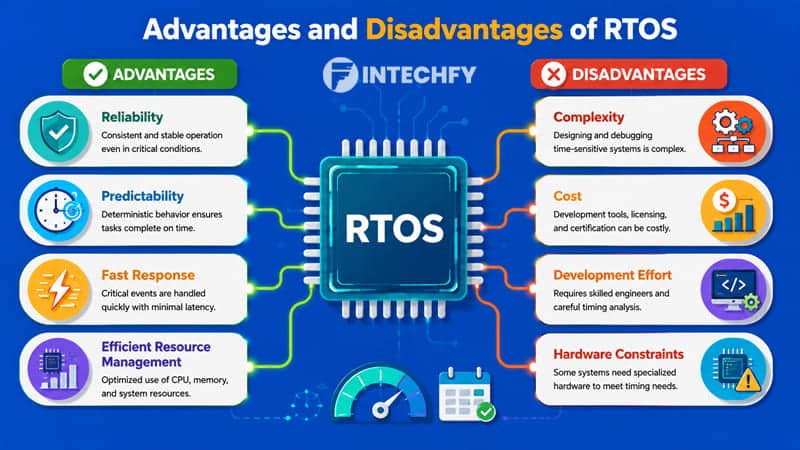
Advantages
A real-time operating system offers several benefits in applications where predictable execution is essential.
- Reliability: Consistent behavior helps maintain stable operation even under demanding workloads.
- Predictability: Tasks execute according to predefined timing requirements rather than competing randomly for processor access.
- Fast Response: Critical events receive immediate attention, reducing delays during time-sensitive operations.
- Efficient Resource Management: Processor time, memory, and system resources are allocated in a controlled manner to support dependable performance.
These strengths make RTOS platforms particularly valuable in control systems, automation equipment, connected devices, and safety-focused applications.
Disadvantages
Despite its strengths, an RTOS also introduces certain challenges.
- Complexity: Designing and testing timing-sensitive applications often requires specialized expertise.
- Cost: Commercial platforms, certification requirements, and development tools may increase project expenses.
- Development Effort: Engineers must carefully analyze timing requirements and validate system behavior.
- Hardware Constraints: Some deployments require processors and peripherals capable of supporting strict timing objectives.
Project requirements, available resources, and operational goals should all be evaluated before selecting a platform.
Industry Adoption and Future of RTOS
Connected products, intelligent machines, and automation technologies continue driving demand for RTOS solutions across a growing range of industries. As devices become more capable, developers increasingly require software platforms that can maintain predictable behavior while processing larger volumes of data.
Based on data from Global Market Insights, the global real-time operating system market was valued at approximately USD 7 billion in 2023 and is expected to grow at a compound annual growth rate of 7.8% through 2032. The steady expansion reflects the increasing reliance on RTOS platforms across IoT devices, industrial automation systems, smart manufacturing environments, and other time-sensitive applications.
Growth in connected infrastructure, advanced manufacturing, autonomous technologies, and intelligent monitoring systems continues creating new opportunities for RTOS adoption. A real-time operating system is expected to remain a key component of next-generation embedded development as industries pursue greater efficiency and automation.
| Industry | Why RTOS Is Used |
|---|---|
| Automotive | Fast safety responses |
| Healthcare | Precise monitoring |
| Aerospace | Mission-critical reliability |
| Manufacturing | Automation control |
| IoT | Real-time processing |
The role of RTOS technology is likely to expand further as smart manufacturing, connected products, and intelligent control systems become more common across global industries.
How RTOS Differs From Other Operating Systems
A real-time operating system focuses on predictable timing and deadline-driven execution. Its primary goal is to ensure critical tasks run within defined time limits, even when system activity increases. Other operating system categories serve different purposes and are optimized for separate computing needs.
- Batch Operating System: Processes jobs in groups and executes them sequentially. Immediate responses are not required, making it suitable for payroll processing, billing systems, and large-scale data workloads.
- Network Operating System: Manages shared network resources, connected devices, user access, and communication services. It is commonly used in enterprise networks, file servers, and centralized IT environments.
- Distributed Operating System: Coordinates multiple computers and presents them as a unified system. Resources and workloads are distributed across machines to improve scalability, performance, and resource utilization.
Conclusion
A real-time operating system plays an essential role in environments where timing accuracy matters as much as functional correctness. Completing a task successfully is only part of the requirement. The result must also arrive within the expected time window to maintain reliability, safety, and operational stability.
Throughout modern technology, RTOS platforms support applications that depend on predictable execution. Automotive control systems, medical equipment, aerospace technologies, industrial automation platforms, and connected devices all rely on timely responses to process information and react to changing conditions.
Several characteristics define a real-time operating system, including deterministic behavior, priority-based scheduling, low latency, and efficient resource management. These capabilities allow critical workloads to operate with consistent timing while maintaining dependable performance.
The growing adoption of smart devices, intelligent machines, and advanced embedded systems continues to increase demand for RTOS technology.
As timing-sensitive applications become more common, selecting the right platform requires careful evaluation of performance goals, hardware resources, timing requirements, and long-term maintenance needs.
A well-chosen RTOS can provide the stability and predictability required for reliable operation in demanding environments.
FAQs About Real-Time Operating System
What is an example of a RTOS?
FreeRTOS is one of the most widely used RTOS platforms. It supports microcontrollers, connected devices, and embedded applications that require predictable task execution and efficient resource management.
Is Linux a RTOS?
Standard Linux is not a real-time operating system because it does not guarantee deterministic timing behavior. Real-time extensions can improve responsiveness for workloads with stricter timing requirements.
What is the most popular RTOS?
FreeRTOS is widely regarded as the most popular RTOS due to its open-source licensing, extensive hardware compatibility, active community support, and strong presence in embedded development.
What is the fastest RTOS?
There is no universally fastest RTOS. Performance depends on processor architecture, scheduler efficiency, interrupt latency, workload characteristics, and application-specific timing requirements.
Why is Windows not RTOS?
Windows is designed for general-purpose computing and prioritizes usability, compatibility, and overall performance. It does not provide guaranteed deadline-based execution required by strict real-time environments.



{kind=link}